17. 求解平方根#
17.1. 引言#
[Russell, 2004] 在第24章讨论早期希腊数学和天文学时,提到了以下这段引人入胜的内容:
早期的毕达哥拉斯学派发现了第一个无理数——2的平方根,并发明了一种巧妙的方法来逼近它的值。
其中最佳方法如下:构造两列数字,分别称为 \(a\) 列和 \(b\) 列,两列均从1开始。在每一步中,新的 \(a\) 值是通过将上一个 \(a\) 值与当前的 \(b\) 值相加得到的;新的 \(b\) 值则是通过将上一个 \(a\) 值的两倍与上一个 \(b\) 值相加得到的。
按此方法得到的前6对数是 \((1,1), (2,3), (5,7), (12,17), (29,41), (70,99)\)。
在每一对中,\(2a^2 - b^2\) 等于1或-1。因此,\(b/a\) 接近于2的平方根,且每进行一步就会更加接近。
读者可以自行验证 \(99/70\) 的平方确实非常接近2。
本讲将深入研究这种古老的平方根计算方法,并运用我们在之前quantecon讲座中学习的矩阵代数知识。
具体而言,本讲可以视为 特征值和特征向量 的延续。
我们将通过一个实例来说明特征向量如何划分出不变子空间,从而帮助构造和分析线性差分方程的解。
当向量 \(x_t\) 从不变子空间开始时,迭代差分方程会使 \(x_{t+j}\) 对所有 \(j \geq 1\) 保持在该子空间中。
这种不变子空间方法在应用经济动力学中有广泛应用,例如在 通过货币资助的政府赤字和价格水平 讲座中就有所体现。
我们将以古希腊数学家用于计算正整数平方根的方法为例,来阐释这一方法。
17.2. 完全平方数与无理数#
如果一个整数的平方根也是整数,则称该整数为完全平方数。
完全平方数的序列从以下数值开始:
而对于非完全平方数的整数,其平方根就是无理数——即无法表示为两个整数的比值,其小数部分是无限不循环的。
古希腊人发明了一种算法来计算整数的平方根,包括那些非完全平方数的整数。
他们的方法主要包含以下步骤:
计算特定的整数序列 \(\{y_t\}_{t=0}^\infty\);
求极限值 \(\lim_{t \rightarrow \infty} \left(\frac{y_{t+1}}{y_t}\right) = \bar r\);
从 \(\bar r\) 推导出所需的平方根。
本讲将详细介绍这种方法。
此外,我们还将利用不变子空间理论,探讨该方法的一些变体,这些变体能够更快地趋近于目标平方根。
17.3. 二阶线性差分方程#
在讲解古希腊人的平方根计算方法之前,我们先简要介绍二阶线性差分方程。
考虑以下二阶线性差分方程:
其中 \((y_{-1}, y_{-2})\) 是给定的初始条件。
方程 (17.1) 实际上代表了序列 \(\{y_t\}_{t=0}^\infty\) 的无限多个线性方程。
对于 \(t = 0, 1, 2, \ldots\) 中的每一个 \(t\),都有一个方程。
我们可以采用 现值 讲座中的方法,将所有这些方程整合为一个矩阵方程,然后通过矩阵求逆来求解。
Note
在这种情况下,矩阵方程涉及可数无穷维方阵与可数无穷维向量的乘法运算。在特定条件下,矩阵乘法和求逆工具可以应用于这类方程。
但我们不会在这里采用这种方法。
相反,我们将寻找一个时不变函数来求解差分方程,即为满足方程(17.1)的序列\(\{y_t\}_{t=0}^\infty\)提供一个公式,使其适用于任意\(t \geq 0\)。
我们要找的是\(y_t\)(当\(t \geq 0\)时)的表达式,将其表示为初始条件\((y_{-1}, y_{-2})\)的函数:
我们称这样的函数\(g\)为差分方程(17.1)的解。
求解的一种方法是采用猜测验证法。
我们首先考虑一对特殊的初始条件,这对初始条件满足:
其中\(\delta\)是待确定的系数。
对于满足(17.3)的初始条件,方程(17.1)可以推导出:
我们希望满足:
这可以重写为特征方程:
运用二次公式求解(17.6)的根,得到:
对于方程(17.7)给出的两个\(\delta\)值中的任一个,差分方程(17.1)的解为:
此处我们定义:
差分方程(17.1)的通解形式为:
其中\(\delta_1, \delta_2\)是特征方程(17.6)的两个解(17.7),而\(\eta_1, \eta_2\)是两个常数,选择它们以满足
或
有时我们可以自由选择初始条件\((y_{-1}, y_{-2})\),这种情况下,我们利用方程组(17.10)来确定对应的\((\eta_1, \eta_2)\)值。
若选择\((y_{-1}, y_{-2})\)使得\((\eta_1, \eta_2) = (1, 0)\),则对所有\(t \geq 0\),有\(y_t = \delta_1^t\)。
若选择\((y_{-1}, y_{-2})\)使得\((\eta_1, \eta_2) = (0, 1)\),则对所有\(t \geq 0\),有\(y_t = \delta_2^t\)。
稍后,我们将把前面的计算与矩阵分解联系起来,用一种简洁的方式表示差分方程(17.1)转移矩阵的特征分解。
在介绍完古希腊人如何计算非完全平方正整数的平方根后,我们将回到这个问题。
17.4. 古希腊人的算法#
设\(\sigma\)为大于1的正整数。
即\(\sigma \in {\mathcal I} \equiv \{2, 3, \ldots \}\)。
我们的目标是找到一个算法来计算\(\sigma \in {\mathcal I}\)的平方根。
若\(\sqrt{\sigma} \in {\mathcal I}\),则称\(\sigma\)为完全平方数。
若\(\sqrt{\sigma} \not\in {\mathcal I}\),则可以证明它是一个无理数。
古希腊人使用递归算法来计算非完全平方数整数的平方根。
该算法对一个二阶线性差分方程的序列\(\{y_t\}_{t=0}^\infty\)进行迭代:
同时还需要一对整数作为初始条件\(y_{-1}, y_{-2}\)。
首先,我们将应用一些解差分方程的技巧,这些技巧在Samuelson Multiplier-Accelerator中也有使用。
与差分方程(17.12)相关的特征方程为:
(请注意,这是上面方程(17.6)的一个特例。)
对方程(17.13)右侧进行因式分解,得到:
其中
当且仅当\(x = \lambda_1\)或\(x = \lambda_2\)时成立。
这两个特殊的\(x\)值通常被称为\(c(x)\)的零点或根。
通过二次公式求解特征方程(17.13)的根,我们得到:
公式(17.15)表明\(\lambda_1\)和\(\lambda_2\)都是\(\sqrt{\sigma}\)的函数,而\(\sqrt{\sigma}\)正是我们和古希腊人想要计算的对象。
古希腊人采用了一种间接方法,巧妙地利用这一性质来计算正整数的平方根。
他们从特定的初始条件\(y_{-1}, y_{-2}\)开始,然后通过迭代差分方程(17.12)来实现这一目标。
差分方程(17.12)的解具有如下形式:
其中\(\eta_1\)和\(\eta_2\)由初始条件\(y_{-1}, y_{-2}\)确定:
线性方程组 (17.16) 在本讲座的剩余部分将发挥重要作用。
由于 \(\lambda_1 = 1 + \sqrt{\sigma} > 1 > \lambda_2 = 1 - \sqrt{\sigma}\), 因此对于几乎所有(但不是所有)初始条件,我们有:
因此,
然而,注意如果 \(\eta_1 = 0\),则:
所以
实际上,如果 \(\eta_1 =0\),那么:
因此会立即收敛,无需取极限。
对称地,如果 \(\eta_2 =0\),那么:
所以同样,会立即收敛,我们不需要计算极限。
线性方程组 (17.16) 有多种使用方式。
我们可以将 \(y_{-1}, y_{-2}\) 作为给定的初始条件,并求解 \(\eta_1, \eta_2\);
我们也可以将 \(\eta_1, \eta_2\) 作为给定值,并求解初始条件 \(y_{-1}, y_{-2}\)。
注意我们上面将 \(\eta_1, \eta_2\) 设为 \((0, 1)\) 或 \((1, 0)\) 来举例说明时使用的是第二种方法的。
采用第二种方法,我们构造了 \({\bf R}^2\) 的一个不变子空间。
现在我们讨论的情况是:
对于 \(t \geq 0\) 和方程 (17.12) 的大多数初始条件 \((y_{-1}, y_{-2}) \in {\bf R}^2\),\(y_t\) 可以表示为 \(y_{t-1}\) 和 \(y_{t-2}\) 的线性组合。
但对于一些特殊的初始条件 \((y_{-1}, y_{-2}) \in {\bf R}^2\),\(y_t\) 可以仅表示为 \(y_{t-1}\) 的线性函数。
这些特殊的初始条件要求 \(y_{-1}\) 是 \(y_{-2}\) 的线性函数。
之后我们会研究这些特殊的初始条件。
但首先让我们编写一些 Python 代码,从任意的 \((y_{-1}, y_{-2}) \in {\bf R}^2\) 开始,在方程 (17.12) 上迭代。
17.5. 实现#
我们现在实现上述算法来计算 \(\sigma\) 的平方根。
在本讲座中,我们使用以下导入:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
FONTPATH = "fonts/SourceHanSerifSC-SemiBold.otf"
mpl.font_manager.fontManager.addfont(FONTPATH)
plt.rcParams['font.family'] = ['Source Han Serif SC']
def solve_λs(coefs):
# 用 numpy.roots来求根
λs = np.roots(coefs)
# 对根进行排序以保持一致性
return sorted(λs, reverse=True)
def solve_η(λ_1, λ_2, y_neg1, y_neg2):
# 对线性系统求解
A = np.array([
[1/λ_1, 1/λ_2],
[1/(λ_1**2), 1/(λ_2**2)]
])
b = np.array((y_neg1, y_neg2))
ηs = np.linalg.solve(A, b)
return ηs
def solve_sqrt(σ, coefs, y_neg1, y_neg2, t_max=100):
# 确保 σ 大于 1
if σ <= 1:
raise ValueError("σ 必须大于 1")
# 特征根
λ_1, λ_2 = solve_λs(coefs)
# 求解 η_1 和 η_2
η_1, η_2 = solve_η(λ_1, λ_2, y_neg1, y_neg2)
# 计算序列直到 t_max
t = np.arange(t_max + 1)
y = (λ_1 ** t) * η_1 + (λ_2 ** t) * η_2
# 计算大 t 时的比率 y_{t+1} / y_t
sqrt_σ_estimate = (y[-1] / y[-2]) - 1
return sqrt_σ_estimate
# 用 σ = 2 做个例子
σ = 2
# 特征方程
coefs = (1, -2, (1 - σ))
# 求 σ 的平方根
sqrt_σ = solve_sqrt(σ, coefs, y_neg1=2, y_neg2=1)
# 计算误差
dev = abs(sqrt_σ-np.sqrt(σ))
print(f"sqrt({σ}) 大约为 {sqrt_σ:.5f} (误差: {dev:.5f})")
sqrt(2) 大约为 1.41421 (误差: 0.00000)
现在我们考虑 \((\eta_1, \eta_2) = (0, 1)\) 和 \((\eta_1, \eta_2) = (1, 0)\) 的情况
# 计算 λ_1, λ_2
λ_1, λ_2 = solve_λs(coefs)
print(f'特征方程的根为 ({λ_1:.5f}, {λ_2:.5f}))')
特征方程的根为 (2.41421, -0.41421))
# 情况 1: η_1, η_2 = (0, 1)
ηs = (0, 1)
# 计算 y_{t} 和 y_{t-1} 当 t >= 0
y = lambda t, ηs: (λ_1 ** t) * ηs[0] + (λ_2 ** t) * ηs[1]
sqrt_σ = 1 - y(1, ηs) / y(0, ηs)
print(f"对于 η_1, η_2 = (0, 1), sqrt_σ = {sqrt_σ:.5f}")
对于 η_1, η_2 = (0, 1), sqrt_σ = 1.41421
# 情况 2: η_1, η_2 = (1, 0)
ηs = (1, 0)
sqrt_σ = y(1, ηs) / y(0, ηs) - 1
print(f"对于 η_1, η_2 = (1, 0), sqrt_σ = {sqrt_σ:.5f}")
对于 η_1, η_2 = (1, 0), sqrt_σ = 1.41421
我们发现收敛是立即的。接下来,我们将通过以下步骤来呈现上述分析:首先对二阶差分方程 (17.12) 进行向量化处理,然后利用相关状态转移矩阵的特征分解。
17.6. 差分方程的向量化#
用一阶矩阵差分方程表示 (17.12)
或
其中
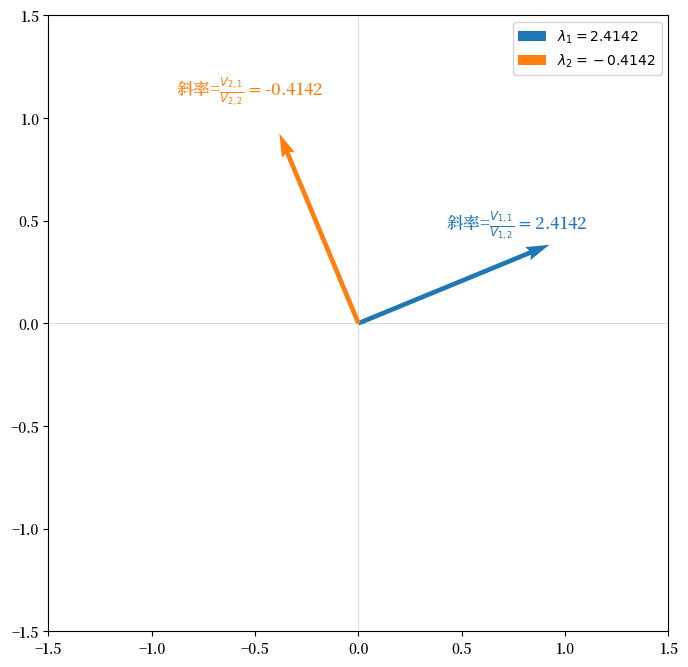
构造 \(M\) 的特征分解:
其中 \(V\) 的列是对应于特征值 \(\lambda_1\) 和 \(\lambda_2\) 的特征向量。
特征值排序为 \(\lambda_1 > 1 > \lambda_2\)。
将方程 (17.12) 写为
现在我们实现上述算法。
首先,我们编写一个迭代 \(M\) 的函数
def iterate_M(x_0, M, num_steps, dtype=np.float64):
# 计算M的特征分解
Λ, V = np.linalg.eig(M)
V_inv = np.linalg.inv(V)
# 初始化结果存储数组
xs = np.zeros((x_0.shape[0],
num_steps + 1))
# 执行迭代
xs[:, 0] = x_0
for t in range(num_steps):
xs[:, t + 1] = M @ xs[:, t]
return xs, Λ, V, V_inv
# 定义状态转移矩阵M
M = np.array([
[2, -(1 - σ)],
[1, 0]])
# 定义初始状态向量x_0
x_0 = np.array([2, 2])
# 执行迭代计算
xs, Λ, V, V_inv = iterate_M(x_0, M, num_steps=100)
print(f"特征值:\n{Λ}")
print(f"特征向量:\n{V}")
print(f"特征向量的逆矩阵:\n{V_inv}")
特征值:
[ 2.41421356 -0.41421356]
特征向量:
[[ 0.92387953 -0.38268343]
[ 0.38268343 0.92387953]]
特征向量的逆矩阵:
[[ 0.92387953 0.38268343]
[-0.38268343 0.92387953]]
我们将特征值与前面计算的方程(17.13)的根(17.15)进行比较:
roots = solve_λs((1, -2, (1 - σ)))
print(f"特征方程的根:{np.round(roots, 8)}")
特征方程的根:[ 2.41421356 -0.41421356]
这验证了(17.17)的正确性。
所求平方根的信息也蕴含在两个特征向量中。
实际上,每个特征向量定义了\({\mathbb R}^3\)中的一个二维子空间,这些子空间由我们在方程(17.8)中遇到的以下形式的动态特性确定:
在方程(17.18)中,第\(i\)个\(\lambda_i\)等于\(V_{i, 1}/V_{i,2}\)。
下图验证了这一点:
17.7. 不变子空间方法#
前面的计算表明,我们可以利用特征向量\(V\)构造二维不变子空间。
接下来我们将探讨这种可能性。
首先定义变换后的变量:
显然,我们可以从\(x_t^*\)反推得到\(x_t\):
下面的符号和方程将在后续分析中发挥重要作用。
令
注意,这源自以下等式:
从中我们可以得到:
以及
这些方程在后续分析中将非常有用。
观察到:
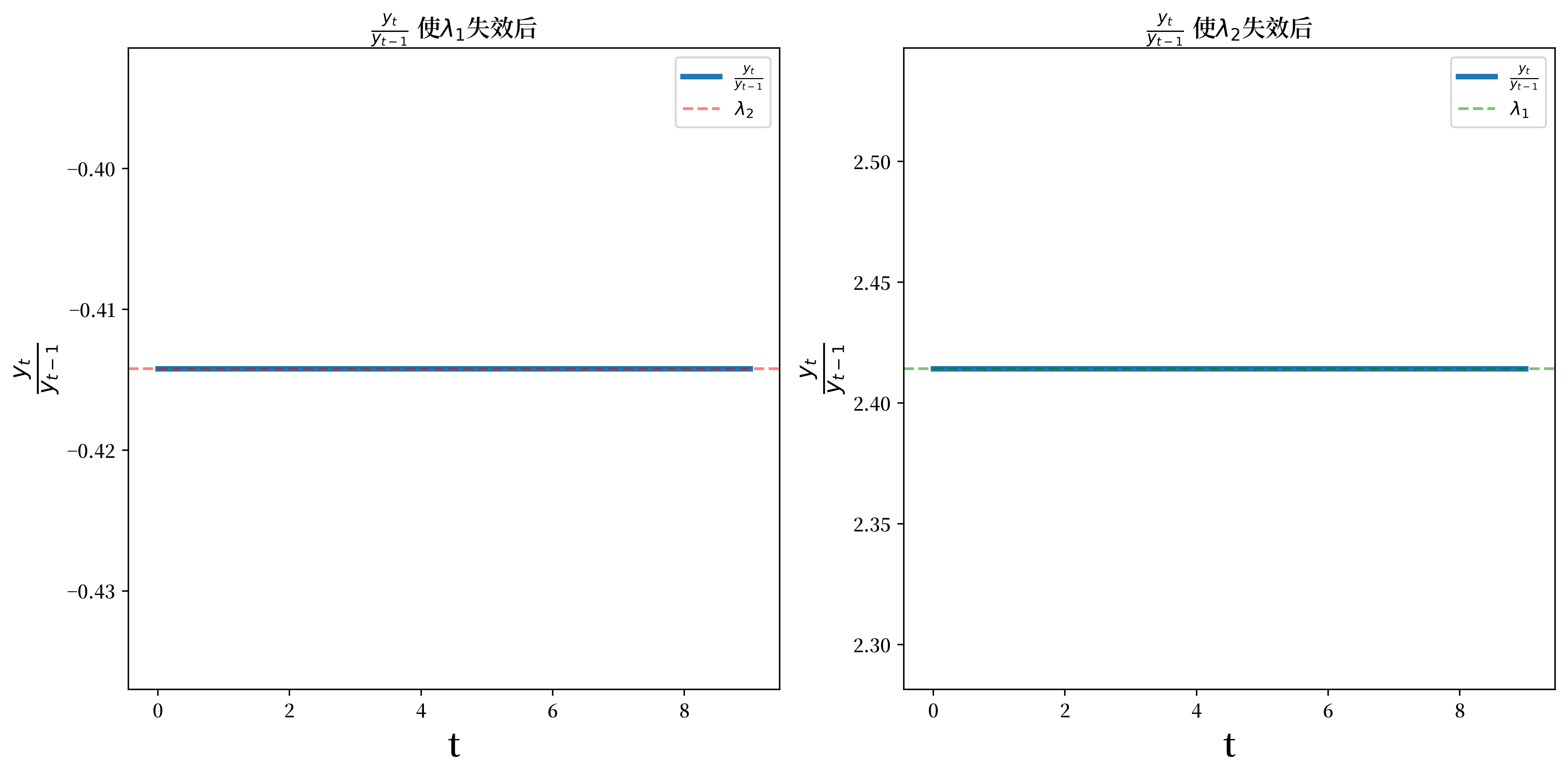
若要使\(\lambda_1\)失效,我们需要设置:
这可以通过如下设置实现:
若要使\(\lambda_2\)失效,我们需要设置:
这可以通过如下设置实现:
为了使\(\lambda_1\)失效,我们使用(17.19):
xd_1 = np.array((x_0[0],
V[1,1]/V[0,1] * x_0[0]),
dtype=np.float64)
# 计算 x_{1,0}^*
np.round(V_inv @ xd_1, 8)
array([-0. , -5.22625186])
我们发现\(x_{1,0}^* = 0\)。
现在我们使用(17.20)使\(\lambda_2\)失效:
xd_2 = np.array((x_0[0],
V[1,0]/V[0,0] * x_0[0]),
dtype=np.float64)
# 计算 x_{2,0}^*
np.round(V_inv @ xd_2, 8)
array([2.1647844, 0. ])
我们发现\(x_{2,0}^* = 0\)。
# 模拟使λ1和λ2失效的情况
num_steps = 10
xs_λ1 = iterate_M(xd_1, M, num_steps)[0]
xs_λ2 = iterate_M(xd_2, M, num_steps)[0]
# 计算比值y_t/y_{t-1}
ratios_λ1 = xs_λ1[1, 1:] / xs_λ1[1, :-1]
ratios_λ2 = xs_λ2[1, 1:] / xs_λ2[1, :-1]
下图展示了两种情况下\(y_t/y_{t-1}\)的比值。
我们观察到,在第一种情况下,比值收敛于\(\lambda_2\);而在第二种情况下,比值收敛于\(\lambda_1\)。
17.8. 结束语#
本讲为不变子空间方法的众多应用奠定了基础。
所有这些应用都利用了类似的基于特征分解的方程。
在通过货币资助的政府赤字和价格水平和许多其他动态经济理论中,我们将遇到与(17.19)和(17.20)非常相似的方程。
17.9. 练习#
Exercise 17.1
请使用矩阵代数来表述伯特兰·罗素(Bertrand Russell)在本讲开始时描述的方法。
定义状态向量\(x_t = \begin{bmatrix} a_t \cr b_t \end{bmatrix}\)。
构建\(x_t\)的一阶向量差分方程,形式为\(x_{t+1} = A x_t\),并确定矩阵\(A\)。
利用系统\(x_{t+1} = A x_t\)复现伯特兰·罗素所描述的\(a_t\)和\(b_t\)序列。
计算矩阵\(A\)的特征向量和特征值,并与本讲中计算的相应结果进行比较。
Solution to Exercise 17.1
以下是一个解决方案:
根据引用的内容,我们可以表述为:
其中\(x_0 = \begin{bmatrix} a_0 \cr b_0 \end{bmatrix} = \begin{bmatrix} 1 \cr 1 \end{bmatrix}\)
根据方程(17.21),矩阵\(A\)可以写为:
然后,对于\(t \in \{0, \dots, 5\}\),有\(x_{t+1} = A x_t\)
# 定义矩阵A
A = np.array([[1, 1],
[2, 1]])
# 初始向量x_0
x_0 = np.array([1, 1])
# 迭代次数
n = 6
# 生成序列
xs = np.array([x_0])
x_t = x_0
for _ in range(1, n):
x_t = A @ x_t
xs = np.vstack([xs, x_t])
# 打印序列
for i, (a_t, b_t) in enumerate(xs):
print(f"迭代{i}: a_t = {a_t}, b_t = {b_t}")
# 计算A的特征值和特征向量
eigenvalues, eigenvectors = np.linalg.eig(A)
print(f'\n特征值:\n{eigenvalues}')
print(f'\n特征向量:\n{eigenvectors}')
迭代0: a_t = 1, b_t = 1
迭代1: a_t = 2, b_t = 3
迭代2: a_t = 5, b_t = 7
迭代3: a_t = 12, b_t = 17
迭代4: a_t = 29, b_t = 41
迭代5: a_t = 70, b_t = 99
特征值:
[ 2.41421356 -0.41421356]
特征向量:
[[ 0.57735027 -0.57735027]
[ 0.81649658 0.81649658]]